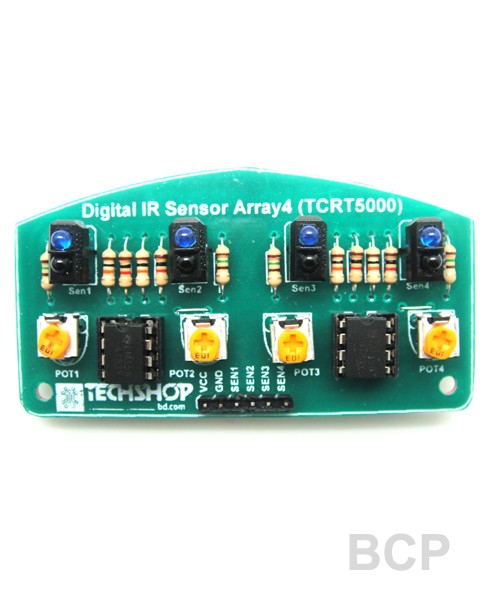
This sensor package is for line following Bot. Every now and then hobbyist who are willing to play with Line following Robot has tough time with the IR sensor arrangement. This is a neat solution for them.
Four TCRT5000 reflective optical sensors have been used here.The LM358 dual OPAMP works as a comparator with two reference voltages set by four POTs.The sensors have 0.5 inch spacing.
Calibration:To calibrate the sensors,you must tune the respective POTs.Connect VCC and GND pins with the power supply and connect SEN1 to SEN4 pins with four LEDs.Keep tuning the POTs until the LEDs glow.
Now,Draw a Black line on a white paper or vice versa.After the proper calibration is done,the LEDs will turn on when the sensors trace black and they will turn off when the Sensors trace white.That means,The output is always either 1(High) or 0(Low).